 hide forever | hide once
hide forever | hide once
Neural Inverse Rendering for
|
||||||||||||||||||||||||||||||||||||||
| Tatsunori Taniai | Takanori Maehara | ||
| RIKEN AIP | RIKEN AIP |
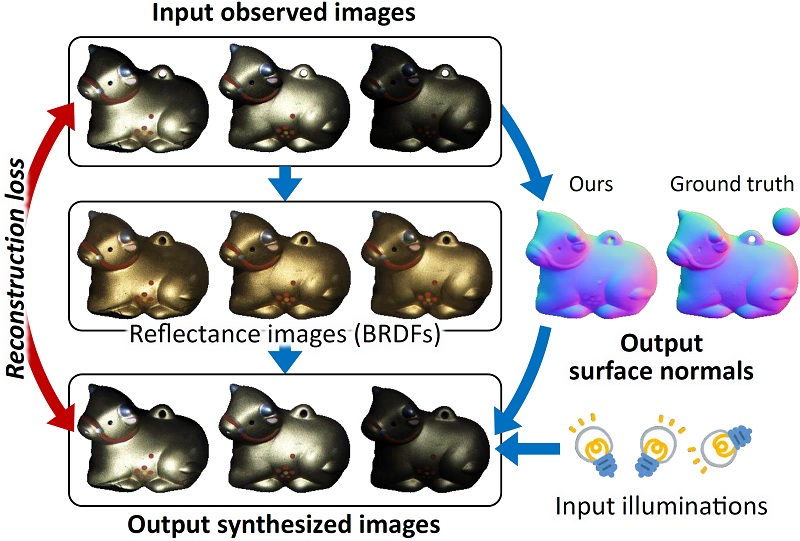
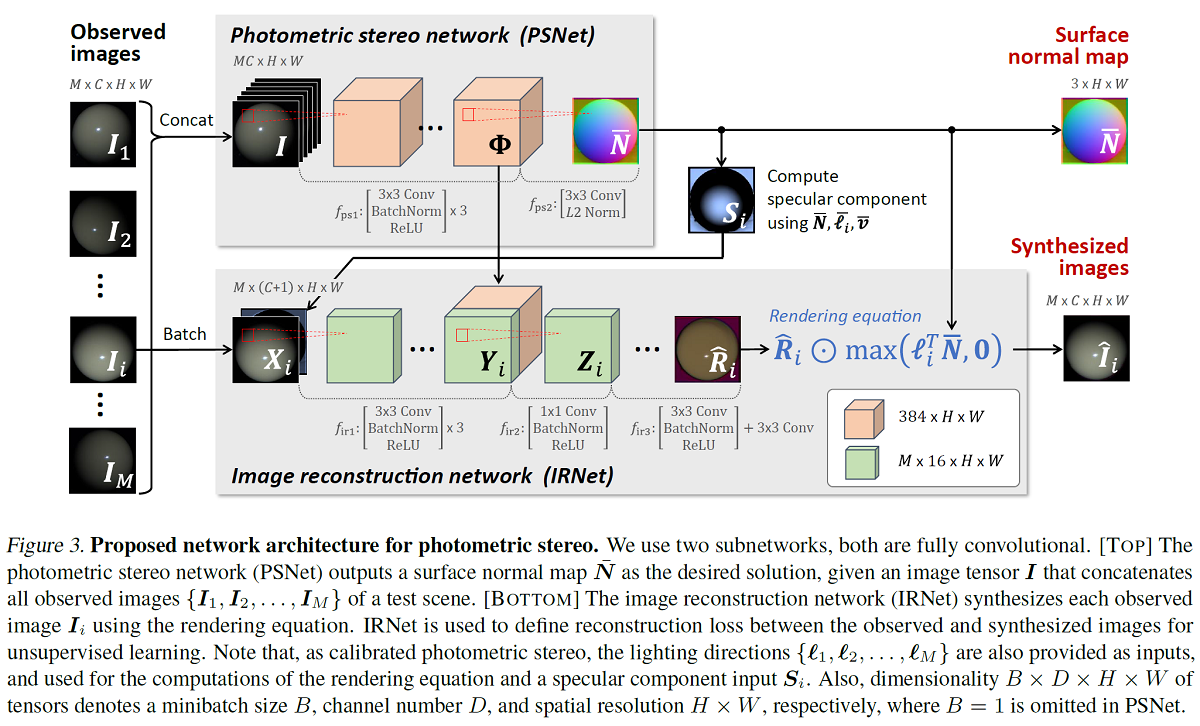
Abstract -- We present a novel convolutional neural network architecture for photometric stereo (Woodham, 1980), a problem of recovering 3D object surface normals from multiple images observed under varying illuminations. Despite its long history in computer vision, the problem still shows fundamental challenges for surfaces with unknown general reflectance properties (BRDFs). Leveraging deep neural networks to learn complicated reflectance models is promising, but studies in this direction are very limited due to difficulties in acquiring accurate ground truth for training and also in designing networks invariant to permutation of input images. In order to address these challenges, we propose a physics based unsupervised learning framework where surface normals and BRDFs are predicted by the network and fed into the rendering equation to synthesize observed images. The network weights are optimized during testing by minimizing reconstruction loss between observed and synthesized images. Thus, our learning process does not require ground truth normals or even pre-training on external images. Our method is shown to achieve the state-of-the-art performance on a challenging real-world scene benchmark.

@inproceedings{Taniai18,
author = {Tatsunori Taniai and
Takanori Maehara},
title = {{Neural Inverse Rendering for General Reflectance Photometric Stereo}},
booktitle = {{Proceedings of the 35th International Conference on Machine Learning (ICML)}},
pages = {4864--4873},
year = {2018},
}
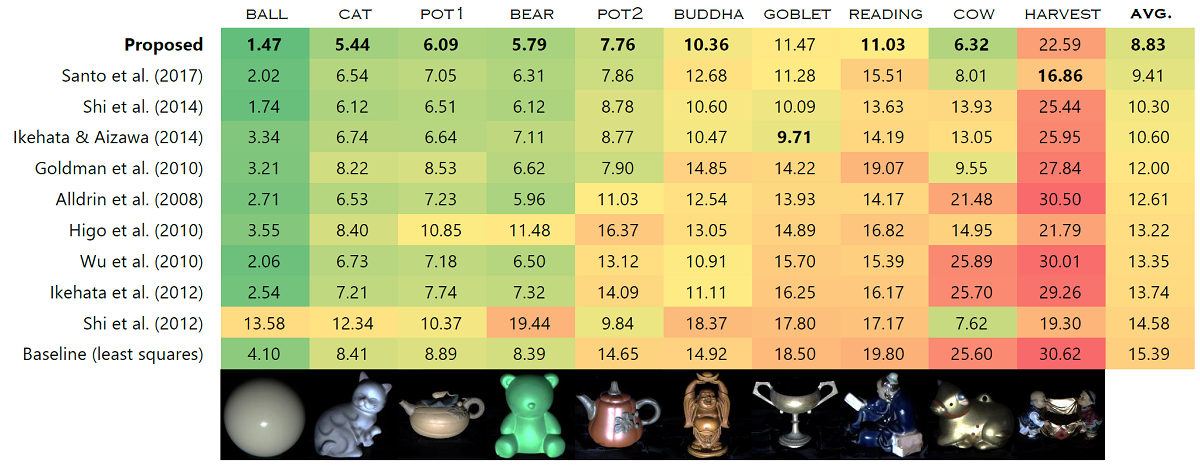
| Error metrics | ball | bear | buddha | cat | cow | goblet | harvest | pot1 | pot2 | reading | AVG. |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean angular errors | 1.47 | 5.79 | 10.36 | 5.44 | 6.32 | 11.47 | 22.59 | 6.09 | 7.76 | 11.03 | 8.83 |
| Median angular errors | 1.26 |
4.38 | 7.38 |
3.87 | 4.41 | 9.47 | 19.90 | 3.46 |
5.57 |
7.33 |
6.70 |